Novel View Pose Synthesis with Geometry-Aware Regularization for Enhanced 3D Gaussian Splatting
POSTECH Computer Graphics Lab
Project Goal
- Enhance the quality of 3D reconstruction
- Improve multi-view consistency
- Incorporate geometry-aware loss terms for accurate surface reconstruction
Project Page
Detailed information about the project can be found in the project page above!
Project Overview
⬇️
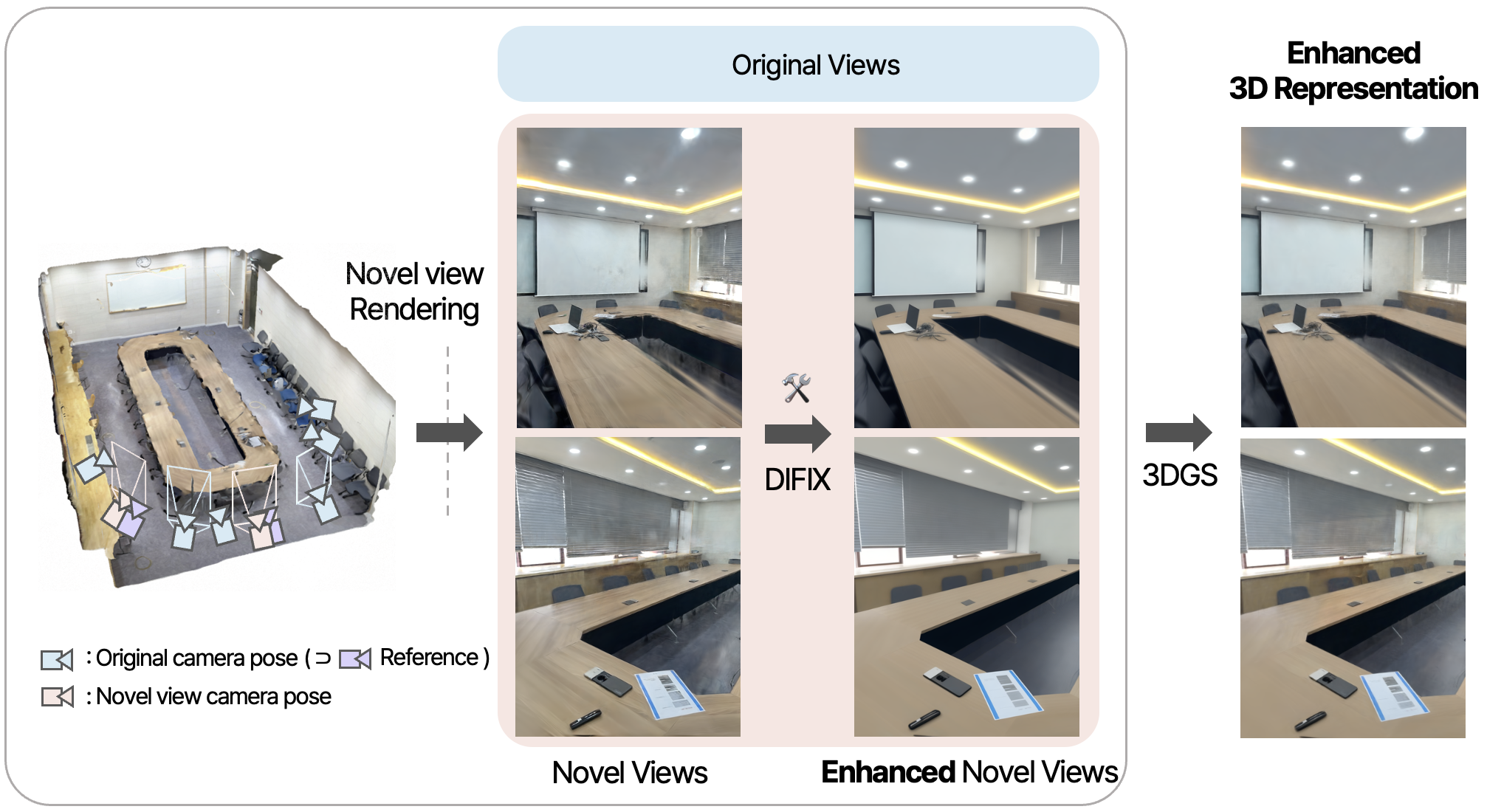
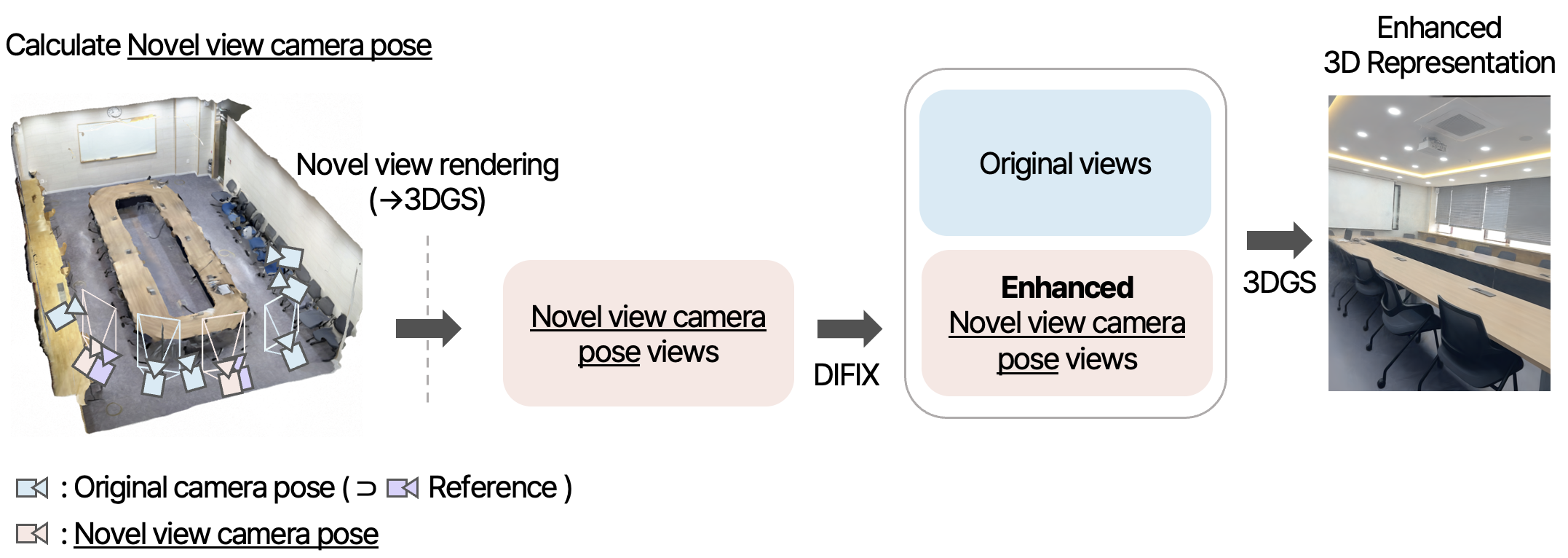
I developed a method to enhance indoor 3D reconstruction with 3D Gaussian Splatting (3DGS) by generating
novel view camera poses, refining them with DIFIX, and applying geometry-aware loss terms.
This approach improves geometry accuracy, multi-view consistency, and reduces artifacts.
Contributions
-
Novel view camera pose generation
- Expanded spatial coverage and ensured consistency between viewpoints
- Removed artifacts in novel-view renderings using DIFIX
-
Introduction of additional loss terms
- Applied LPIPS loss only to novel views to preserve structural details beyond pixel similarity
- Applied normal consistency loss and depth smoothness loss to all views to improve geometry quality
Results
| Method | Initial Points | PSNR ↑ | SSIM ↑ | Training Time | Frames |
|---|---|---|---|---|---|
| 3DGS | 100,000 | 20.423 | 0.856 | 2h 13m | 168 |
| 2DGS | 100,000 | 19.219 | 0.828 | 2h 1m | 168 |
| 2DGS (Novel) | 100,000 | 20.375 | 0.842 | 1h 59m | 208 |
| Ours (Novel) | 100,000 | 21.605 | 0.861 | 2h 6m | 208 |
| Ours + Loss | 100,000 | 21.675 | 0.862 | 3h 55m | 208 |
- Compared to 3DGS, our method improves PSNR from 20.423 → 21.675 and SSIM from 0.856 → 0.862
- Applying the method to 2DGS also yields consistent improvements, demonstrating generalizability
Visualization
🧑💻 My Role: Conceived the research idea, designed the methodology, and carried out the entire implementation
— including dataset preparation, novel view generation, loss function integration, and experimental evaluation — with advisory
input from a doctoral researcher.
 3dgs-quality-enhancement
3dgs-quality-enhancement