Novel View Pose Synthesis with Geometry-Aware Regularization for Enhanced 3D Gaussian Splatting
@POSTECH Computer Graphics Lab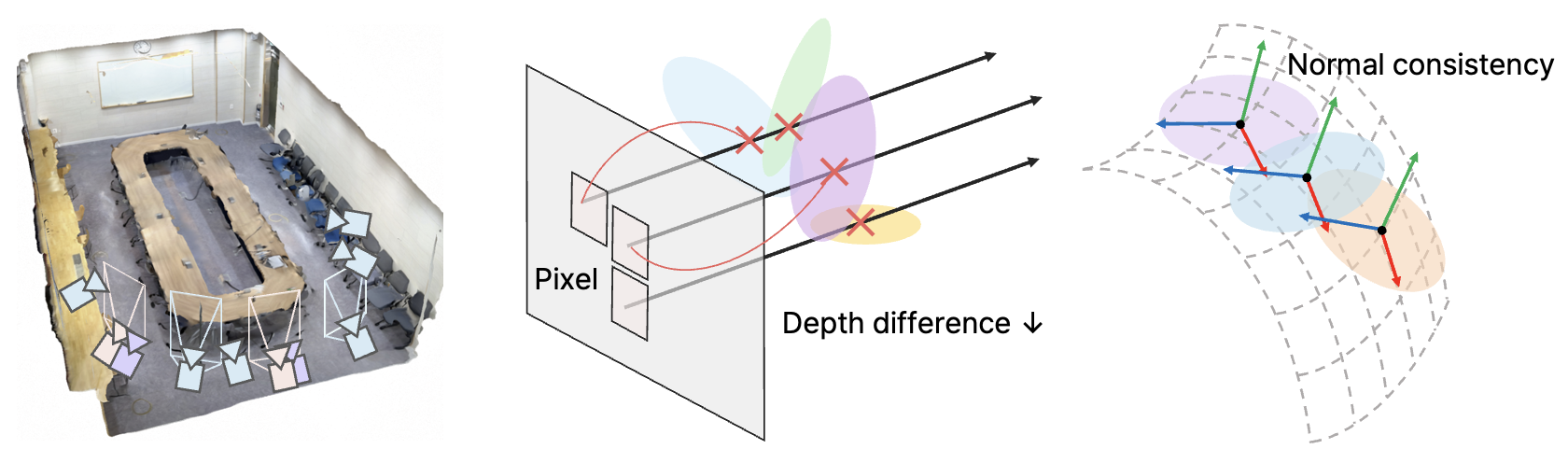

@POSTECH Computer Graphics Lab
Integrating object detection, lane detection, depth estimation, and driving algorithms to develop an autonomous vehicle.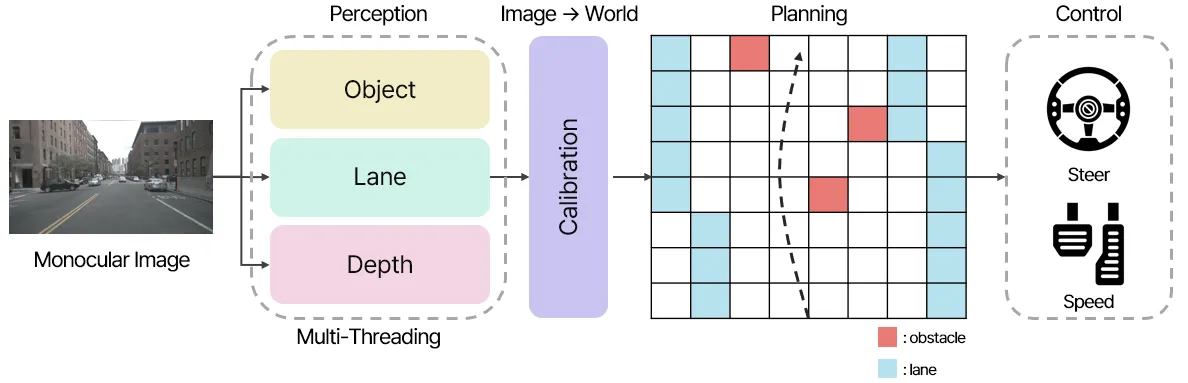
Memory optimization for 3D Gaussian Splatting.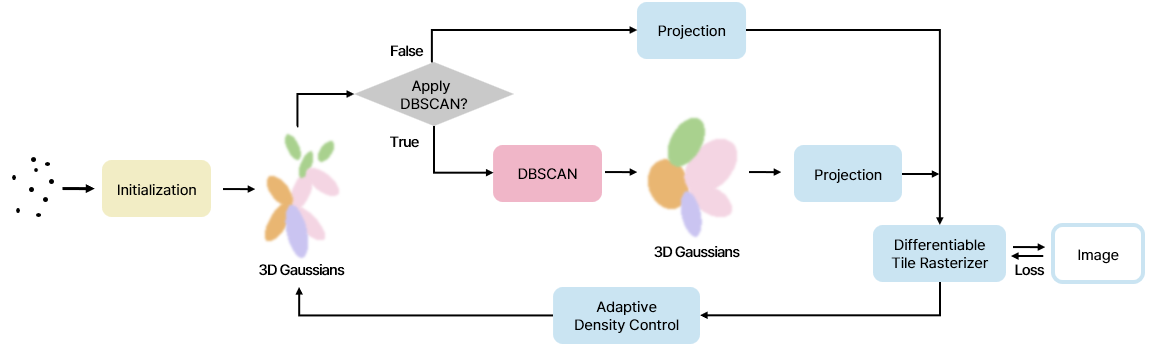
Analyzing gait based on data measured by the IMU sensor.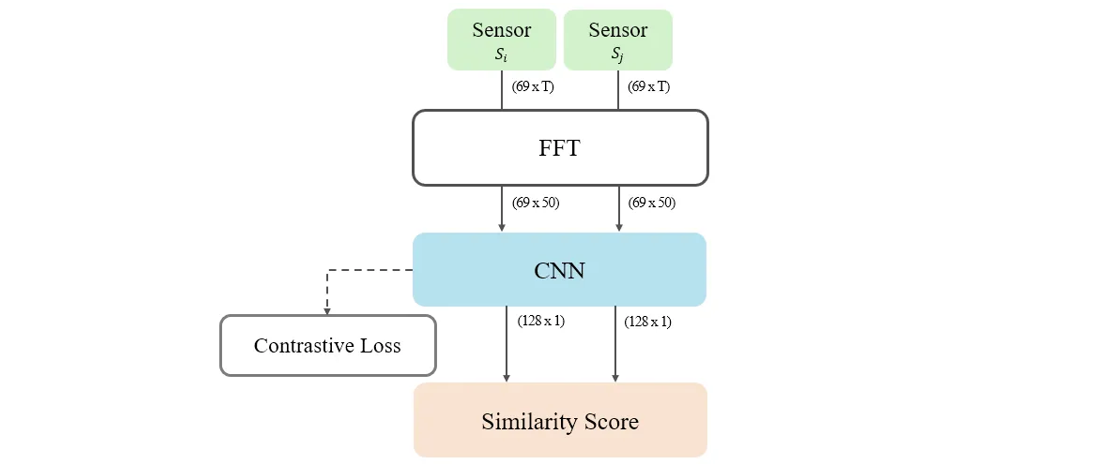
Developing a web application using Flask.
Published in IEIE 2024, 2024
This paper presents a model to enhance 3D Gaussian Splatting performance using DBSCAN clustering.
Dayeon Woo‡1, Eunseo Seo‡2, Chehun Han‡3, Yeonkyung Lee‡4, *Changgyun Jin5 (‡: Equally Contributed)
Download Paper | Download Slides